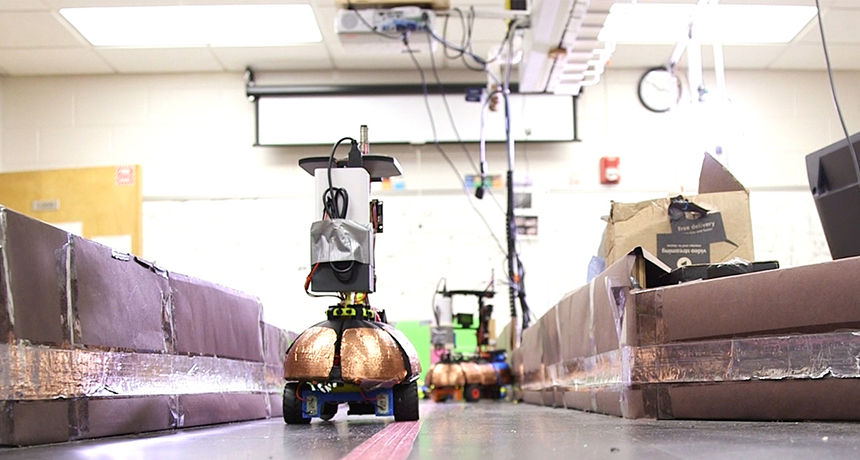
CROWD CONTROL Teams of robots working in tight, crowded spaces (like those above) could work more efficiently if a few bots do most of the work.
Georgia Tech
CROWD CONTROL Teams of robots working in tight, crowded spaces (like those above) could work more efficiently if a few bots do most of the work.
Georgia Tech