LIGO will be getting a quantum upgrade
Quantum ‘squeezing’ light could lead to daily gravitational wave detections
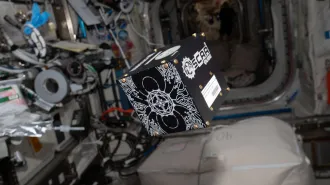
BETTER DETECTOR Scientists have been working on upgrades to LIGO (shown). Soon, the gravitational wave detector will begin using quantum techniques.
LIGO Lab/MIT/Caltech
WASHINGTON — Gravitational wave detectors are going quantum.
A planned revamp of the Advanced Laser Interferometer Gravitational-Wave Observatory, LIGO, relies on finessing quantum techniques, LIGO scientists announced February 14. That $35 million upgrade could let scientists catch a gravitational wave every day, on average. LIGO’s current tally of 11 gravitational wave events could be surpassed in a single week, LIGO researchers said in a news conference at the annual meeting of the American Association for the Advancement of Science.
Starting up in 2024, the revved up detector, known as Advanced LIGO Plus, will seek to wrangle a quantum rule, the Heisenberg uncertainty principle, to improve the machine’s ability to detect ripples in spacetime. The Heisenberg uncertainty principle states that it’s impossible to precisely measure certain properties, such as the position and momentum of an object, at the same time.
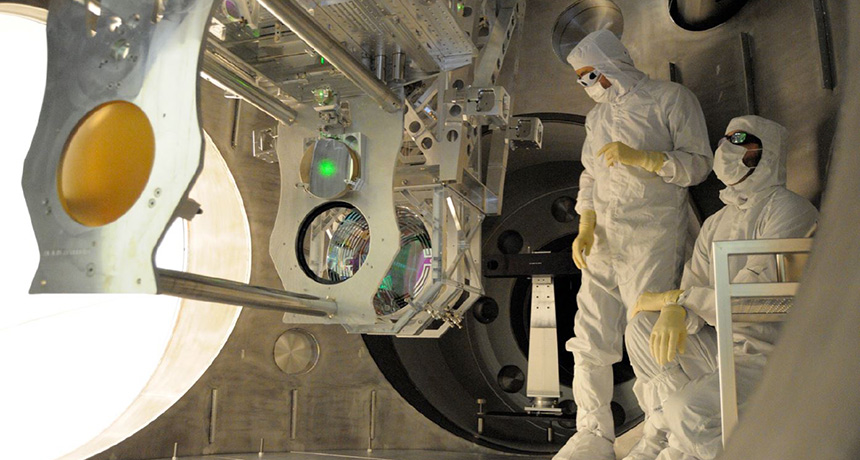
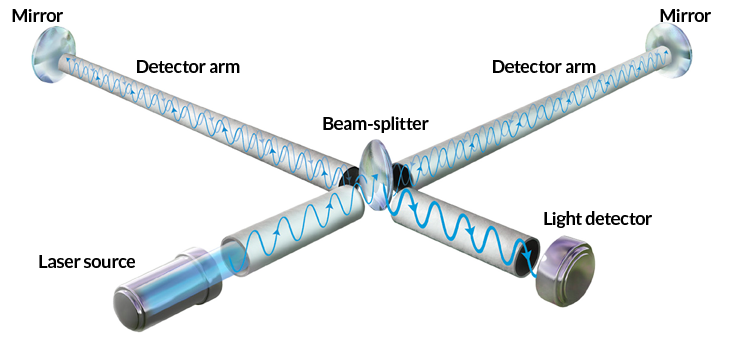
In LIGO, this translates to a give-and-take in the light scientists monitor to detect gravitational waves. At each of the observatory’s two detectors, located in Livingston, La., and Hanford, Wash., laser light bounces back and forth within two 4-kilometer-long arms arranged in an “L”. To determine whether a gravitational wave is passing through, scientists measure the brightness of the light where the arms meet and the beams recombine (SN: 3/5/16, p. 22).
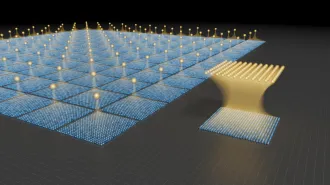
Waves meet
In LIGO’s detectors (one illustrated) light from a laser bounces back and forth through two arms, traveling as a wave. Those light waves recombine and are recorded by a light detector (bottom right). A new version of the detector will strive to minimize quantum fluctuations that affect this light.
Due to quantum mechanics, that light fluctuates in two ways: in its phase, the timing of the light wave; and in its amplitude, which determines the light’s intensity. This variation muddles LIGO’s measurements, making it more difficult to pick out the subtle signals of a gravitational wave. So in LIGO’s next round of operation, to begin in April, researchers will for the first time use quantum “squeezed” light, in which the fluctuations in the light’s phase are decreased. As a result, LIGO will better capture waves of higher frequencies — ripples that would have a higher pitch if converted into sound waves.
“That’s exciting, but it comes with a penalty,” physicist Michael Zucker of Caltech and MIT LIGO Laboratory said in the news conference. Fluctuations in the power of the light are increased, which makes measuring lower frequency gravitational waves more difficult. “It doesn’t excuse you from Heisenberg’s uncertainty principle.”
But in Advanced LIGO Plus, scientists will use a system that will make the best of both worlds, squeezing the light one way for lower frequency ripples and another for higher frequency signals, to improve the machine’s performance overall. “That is another step in complexity,” says physicist Hartmut Grote of Cardiff University in Wales. Grote helped pioneer light squeezing techniques in a smaller gravitational wave detector called GEO 600, located near Hannover, Germany.
Another detector in India, called LIGO-India, is also expected to turn on at around the same time as Advanced LIGO Plus, and will employ the same quantum techniques.