Caterpillar robot uses squishy, 3-D printed legs to inch and crawl
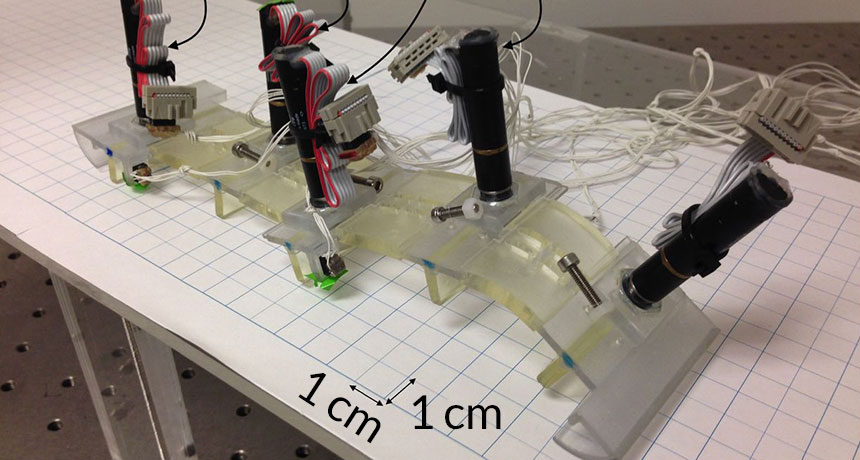
SQUISHY PARTS Soft legs help this robot sense the environment and switch between two different caterpillar-like gaits.
T. Umedachi et al./Royal Society Open Science 2016
SQUISHY PARTS Soft legs help this robot sense the environment and switch between two different caterpillar-like gaits.
T. Umedachi et al./Royal Society Open Science 2016