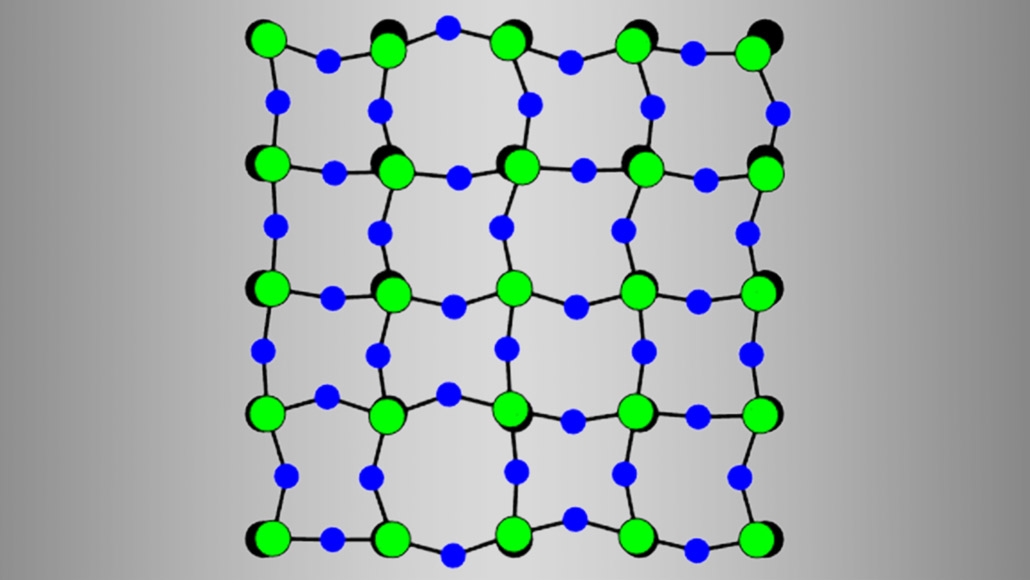
In a scandium fluoride crystal, the distance between atoms of scandium (illustrated in green above) and fluorine (blue) stays almost the same at higher temperatures. But fluorine atoms can move closer and farther apart from each other, causing the crystal to shrink.
Brookhaven National Laboratory
When things heat up, most solids expand as higher temperatures cause atoms to vibrate more dramatically, necessitating more space. But some solid crystals, like scandium fluoride, shrink when heated — a phenomenon called negative thermal expansion.
Now, by measuring distances between atoms in scandium fluoride crystals, scientists think that they have figured out how that shrinkage happens. While the bonds between scandium and fluorine stay fixed when heated, the fluorine atoms in the crystal are free to wiggle around a bit. That mix of rigidity and flexibility causes the crystal’s sides to buckle, the researchers report online November 1 in Scientific Advances.
“Some of the biggest challenges in our field have to do with answering questions about solids” with structures similar to scandium fluoride, says Jason Hancock, a physicist at the University of Connecticut in Storrs, who was not involved in the study. Solving the mystery of negative thermal expansion in scandium fluoride may help physicists understand more about similar materials, such as copper-based superconductors, which transmit electricity without resistance but still at temperatures too low to be of much practical use (SN: 12/8/17).
Scandium fluoride “is the simplest material where this phenomenon was present in full strength, and that allowed us to disentangle what actually is happening,” says Igor Zaliznyak, a physicist at Brookhaven National Laboratory in Upton, N.Y. The molecular jiggling that allows scandium fluoride to shrink is probably similar in other materials, Zaliznyak says.
The team figured out the mechanism using a technique called total neutron diffraction. The researchers bombarded scandium fluoride with a beam of neutrons and recorded how the subatomic particles bounced off of the crystals at temperatures up to 1,100 kelvins (about 827° Celsius). By analyzing the scattering patterns, the scientists calculated the likely distances between pairs of atoms.
The distance between scandium and fluorine atoms was roughly the same when heated, implying that the chemical bond between the two is rigid. The same proved true for spacing between individual scandium atoms. But there was a huge range of distances between fluorine atoms, indicating that their positions in the crystal’s atomic lattice are more flexible. This combination of fixed and variable distances between atoms, the researchers say, keeps the crystal roughly in its cubic shape while allowing its sides to buckle and compress.