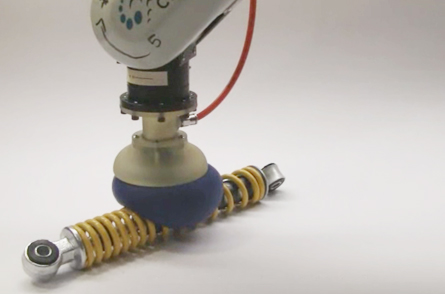
A small bag filled with coffee grounds is lending robots a fingerless hand. The new kind of gripper, described online the week of October 25 in the Proceedings of the National Academy of Sciences, is capable of grasping all sorts of different objects with ease.