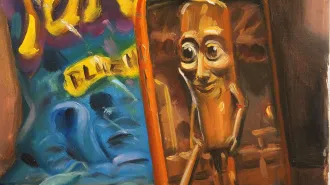
A blocky, bright-yellow robot that would look at home in a toy chest moves like a salamander, as its inventors intended. The robot and the mathematical model behind it provide insights into how vertebrates transitioned from swimming to walking, the researchers say.

Computer scientist Auke Jan Ijspeert of the Swiss Federal Institute of Technology in Lausanne and his colleagues chose to model the salamander because it resembles the first terrestrial vertebrates. Salamanders can both swim and walk. A network of neurons located in the spinal cords of salamanders and other vertebrates triggers motion in the body’s musculature that leads to the swimming gait. Another such network in the limbs produces a walking gait.
Each of these body and limb networks generates regular patterns of nerve cell activity that cause muscles to contract and relax in a rhythmic fashion. Ijspeert and his coworkers propose that the limb network appeared later in the salamander’s evolutionary development than the body network. Coordination between the two networks enables salamanders to sometimes swim and sometimes walk.
The researchers also hypothesize that nerve cells within the limb network switch between muscle-contracting and muscle-relaxing states more slowly than cells in the body network do. When the brain sends out signals in rapid succession, the limb network can’t keep up, leaving the body network in command. At low frequencies of stimulation, the limb network overrides the body network and the animal walks.
To test their theories, the researchers first produced a mathematical model based on data on nerve and muscle function in salamanders and limbless animals. However, “we wanted to test our model with a real body,” Ijspeert says.
So, the researchers used their model to create software representing the limb and body networks and installed it in an 85-centimeter-long robot.
The robot’s software resides in a microprocessor that’s controlled wirelessly. The operator of the robot acts as its brain, sending higher- or lower-frequency signals to the microprocessor, which in turn controls the robot’s motors. In response, the robot either swims or walks.
In the March 9 Science, the team reports that its programmed robot mimics a salamander’s two gaits, albeit slowly, especially when swimming. The team also presents biological evidence that the neurons in the salamander’s limb network indeed switch states more slowly than those in the body network do.
By bringing together biology, engineering, and mathematics, the work is “a wonderful example of how different disciplines are necessary and are coming together” to solve problems such as how animals move, comments Robert J. Full, an integrative biologist at the University of California, Berkeley.
He adds that while the salamander model is an “outstanding first step,” it takes only the motion of the body parts into consideration. A full understanding of locomotion, he says, requires that scientists also consider forces, such as how an animal pushes on the ground.