Severe maulings hardly slowed down the robotic assassins in the Terminator science fiction movies. Now, roboticists have made a real machine that carries on despite serious damage.
The crucial factor in that feat, the robot’s developers say, was to program the device’s computer to create and update a representation of the machine’s physical structure. That way, when the robot broke, the device recognized its changed condition and found new ways to reach its goals.
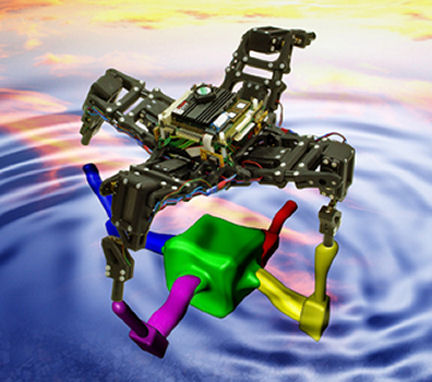
In the Nov. 17 Science, computer scientist Josh Bongard of the University of Vermont in Burlington and his colleagues describe a starfishlike, ambulatory machine that they created. They report detaching a portion of one of the four legs and that, in response to the insult, the device changed its gait.
Under similar circumstances, most conventional robots would stop functioning, notes Christoph Adami of the Keck Graduate Institute of Applied Life Sciences in Claremont, Calif., commenting in the same issue of Science.
The self-adjusting machine could adapt because its computer software includes a novel algorithm, explains mechanical engineer and team leader Hod Lipson of Cornell University. In that algorithm, the machine uses electrical readings from its two tilt sensors and eight motors to determine its structure.
In an iterative process, the computer figures out which of about 100,000 possible arrangements of the machine’s parts is generating those readings, Bongard says.
Once the computer comes up with a plausible structure, it hypothesizes many series of component movements and calculates how far the robot could move as a result of each series, Lipson adds. Finally, the robot implements the motions that it predicts will maximize the distance traveled—the goal specified for it by its designers.
The new work is “a major advance in autonomous robotics,” says roboticist Dario Floreano of the Swiss Federal Institute of Technology in Lausanne. “The algorithm … is very efficient and applicable to a wide range of robots.”
Typically, when creating a robot, developers face two daunting tasks, says Cornell mechanical engineer Victor Zykov, a codesigner of the new machine. The scientists must devise a detailed, mathematical model of the device and also create a related control mechanism that operates the robot under various conditions.
In the new experiment, neither step was necessary. “This achievement could be expanded to other machines that are difficult to control,” Zykov adds. Those could include the remarkably agile prosthetic limbs currently under development, Lipson says.
“Designing robots that can adapt to changing environments and can compensate for damage has been a difficult problem,” comments neuroscientist Olaf Sporns of Indiana University in Bloomington. “This work provides a new way toward solving this important problem.”
Sporns uses robots to study how body structure influences the data that a machine or organism gathers about its environment. With the new self-modeling robot, cognitive scientists might investigate whether people and other animals employ abstract representations of their bodies and environments, Lipson says.